
ARCHEOASTRONOMIA LIGUSTICA
Pubblicato in: Il
cielo in terra ovvero della giusta misura, Atti del XIV Convegno
della Societ� Italiana di Archeoastronomia. Padova University
Press, Padova, novembre 2015, pp. 117-132, ISBN 978-88-6938-053-2.
METODI NAUTICO E JD IN
ARCHEOASTRONOMIA
Mario Codeb�[1]
Henry de Santis[2]
Agostino Frosini[3]
Abstract
This article describes two basic methods of calculations of the astronomical
azimuth, and relative declination subtended, of an alignment, when are known:
1) the geographical latitude, longitude and
height above sea level;
2) the exact time of the measurement;
3) the angle between the alignment and the
celestial body (usually the Sun) � measured with the theodolite, spherical
surveyor's cross or other equivalent instruments � in the instant of
measurement.
The Julian Day Method (JD) is only valid for
measurements made with the Sun, while the Nautical Method can also be used with
Moon, stars and planets, with a few changes.
It also describes the use of the two software
in JavaScript- developed by Agostino Frosini, free downloadable on the site
www.archaeoastronomy.it
1)
Gli strumenti (Henry de Santis)
I due metodi si utilizzano con strumenti ottici altazimutali. I seguenti sono quelli posseduti da Archeoastronomia Ligustica:
- Teodolite Zeiss RK76A1 a graduazione altazimutale millesimale 6400��, precisione nominale di 0,1�� = 0�00'20,25". Completo di: livelle azimutali sferica e torica, prisma zenitale, autoilluminazione elettrica interna, declinatore magnetico, filtro solare.
- Teodolite Meopta T1c a graduazione altazimutale quattrocentesimale (360� = 400g), lettura diretta di 0,01�� ( = 0�00'32,4"), livella torica azimutale e zenitale, declinatore magnetico, illuminazione interna.
- Goniometro ottico
Wild G-
- Goniometro militare italiano Cipriani Baccani & C., a graduazione altazimutale millesimale 6400��, precisione nominale di 1�� ( = 0�03'22,5"), livelle sferica e torica, declinatore magnetico, illuminazione interna solare, possibilit� di misura allo zenit.
Poich� i sopra indicati strumenti
hanno un peso, variabile, di alcuni chilogrammi che ne rende difficoltoso il
trasporto su terreni impervi o accidentati, si pu� utilizzare lo squadro
sferico graduato o squadro agrimensorio a graduazione quattrocentesimale, nonio ventesimale e lettura diretta di
Gli altri dispositivi necessari per poter effettuare misurazioni sono:
- Bussola prismatica a lettura diretta di 1�: utile per accertare, in prima approssimazione, l�azimut del manufatto oggetto d�indagine. Poich� le bussole sono affette dalle anomalie magnetiche non � mai del tutto corretto effettuare misure basandosi solo su di esse. Per minimizzare le anomalie magnetiche bisogna in ogni caso determinare queste ultime sul campo (Codeb� 1997a, pp. 323 � 335).
- Inclinometro a gravit� oppure livella Abney: sono strumenti che misurano, in gradi e primi, l�altezza di un oggetto rispetto all�orizzonte. Non sono necessari qualora si utilizzino i succitati strumenti ottici, in quanto l�altezza dell�orizzonte visibile pu� essere letta sul cerchio zenitale.
- Orologio radiocontrollato: indispensabile per determinare gli istanti di tempo quando si traguarda il Sole durante le misure. Il controllo radio periodico, cui � sottoposto, gli permette di ricevere un segnale d�aggiornamento proveniente da alcuni orologi al cesio (Istituto Federale Fisico-Tecnico di Braunschweig e National Physical Laboratory di Teddington per l�Europa; N.I.S.T. di Fort Collins in Colorado per gli USA; C.R.L. di Tokio per il Giappone).
- G.P.S.: indispensabile per rilevare le coordinate geografiche e posizionare i siti d�interesse. Il G.P.S. consente pure, in qualsiasi parte del globo, la lettura dell�ora fornita dagli orologi al cesio interni ai satelliti
2) Gli Algoritmi (Mario Codeb�)
Questi due algoritmi sono stati
studiati appositamente per il rilevamento archeoastronomico
per mezzo di strumenti topografici ad orizzonte artificiale[4]:
teodolite, squadro sferico graduato, inclinometro, ecc. Il metodo Nautico permette di calcolare l�azimut e la declinazione di
un astro qualsiasi (tra quelli i cui dati sono riportati nelle Effemeridi
Nautiche EN) nell�istante del rilevamento ed in relazione ad esso. Il Metodo JD permette di calcolare l�azimut
e la declinazione unicamente del Sole. Si tenga per� presente che l�astro
diurno � l�unico di fatto utilizzato nel rilievo archeoastronomico.
Sommando algebricamente l�azimut dell�astro
cos� calcolato all�angolo, misurato strumentalmente, tra l�allineamento del
monumento archeologico � definito per mezzo di paline opportunamente
verticalizzate � e l�astro, si ottiene l�azimut del monumento scevro da
influenze ed errori magnetici[5].
Dall�azimut astronomico cos� ottenuto si passa alla declinazione da esso
sottesa, in funzione dell�altezza misurata dell�orizzonte visibile antistante,
e quindi all�eventuale astro sorgente o tramontante davanti ad esso. In passato
(Codeb� 1997b) usavamo trasformare tale declinazione
in quella dell�epoca in cui il monumento fu eretto[6] per
mezzo della formula di Laskar (Meeus
2005, p. 147). Oggi preferiamo calcolare separatamente questa declinazione
pregressa[7] per
mezzo degli appositi algoritmi di calcolo della posizione di Sole (Meeus 1988 e 1990, cap. 18; 2005, cap. 25), Luna (Meeus 1988 e 1990, cap. 30; 2005, cap. 47) o stelle (Meeus 1988 e 1990, capp. 114, 15,
16; Codeb� 2011; 2012) o per mezzo di un software
affidabile come Solex[8]. Ci
ripromettiamo di arricchire i nostri programmi in Javascript
�Metodo Nautico� e �Metodo JD� con questi calcoli.
Rispetto alle nostre precedenti
pubblicazioni (Codeb� 1997b; 2010; Codeb�, Frosini 2013), abbiamo corretto (Codeb� 2014) le tre formule � semplificata[9],
geodetica e nautica[10] �
per la trasformazione dell�altezza misurata ho
in altezza vera hv,
eliminando la correzione per la depressione dell�orizzonte in quanto essa si
applica agli strumenti a riflessione � come il sestante � (Flora 1987, par. 200,
228) e non a quelli ad orizzonte artificiale.
Di seguito sono riportati le
abbreviazioni, i simboli e le sigle utilizzate nei due algoritmi:
a) comuni ai due metodi:
sen = seno;
cos = coseno;
tan = tangente;
arcsen = arcoseno
arcos = arco coseno
arctan = arcotangente
� = Sole;
= Luna;
� = stella;
● = pianeta;
Φ = latitudine;
Λ = longitudine;
Δ = declinazione;
δa = declinazione sottesa dall�allineamento (con quel dato azimut e con quell�altezza dell�orizzonte visibile);
A = azimut;
Ab = Azimut bussola, cio� magnetico;
Am = azimut misurato con lo strumento (teodolite, squadro sferico graduato, diottra, ecc.);
Aa = azimut dell�asse del monumento archeologico;
h, m, s = ore, minuti e secondi di tempo;
ho = altezza misurata (altrimenti detta �osservata�) sull�orizzonte visibile;
hv = altezza vera sull�orizzonte visibile;
R = rifrazione atmosferica;
Sd = semidiametro di un astro. Vale
praticamente solo per Sole e Luna, che si presentano visivamente come dischi.
Nelle Effemeridi Nautiche � dato giornalmente per
Π = parallasse dell�astro. Quella del Sole Π� vale, al J2000.0, mediamente 0�00�08,794148�. Quella della Luna Π vale mediamente 0�57�02,7� quando essa � all�orizzonte astronomico e (0�57�02,7�cos ho) quando invece � sopra di esso di una quantit� ho (misurabile con il cerchio zenitale del teodolite, o con l�inclinometro o con il sestante). Quella delle stelle Π� � evanescente. La parallasse di Sole, Luna e pianeti Π● pu� anche essere ricavata dalla tavola XXIV delle Tavole Nautiche. Nelle Effemeridi Nautiche quella lunare � data di ora in ora per ciascun giorno dell�anno;
b) del Metodo Nautico
tm = tempo medio del luogo di osservazione, ovvero sua ora civile;
Tm = tempo medio di Greenwich, ovvero sua ora civile (altrimenti detto, con dizione scorretta, GMT[11]);
tv = tempo vero, ossia angolo orario del centro dell�astro contato a partire dal meridiano superiore dell�osservatore verso W. Il meridiano superiore � quel meridiano che comprende un polo dell�equatore e lo zenit dell�osservatore. Il meridiano inferiore � quello che contiene l�altro polo dell�equatore ed il nadir dell�osservatore;
Tv = il tempo vero al meridiano di Greenwich;
Im = intervallo medio di minuti e secondi nelle pagine colorate delle EN
Iv = intervallo vero di minuti e secondi nelle pagine colorate delle EN
Ν = correzione del Tv nelle EN
D = correzione di δ8 nelle EN
pp = parti proporzionali delle pagine colorate delle EN
c) del Metodo JD
JD = giorno giuliano;
JDE = giorno giuliano delle effemeridi
INT = parte intera di un numero con decimali
AAAA = anno
MM = mesi
DD,dddd = giorno con parti decimali esprimenti le ore, i minuti ed i secondi
T = tempo in secoli giuliani
L8 = longitudine media geometrica del Sole
M8 = anomalia media del Sole
C8 = equazione del centro del Sole
Lv8 = longitudine vera del Sole
La8 = longitudine apparente del Sole
Ec = eccentricit� dell�orbita terrestre
H = angolo orario, ossia tv, dell�astro;
ET = equazione del tempo, ossia differenza algebrica tra il tempo vero ed il simultaneo tempo medio (o viceversa, con relativo cambiamento di segno algebrico) = ETm = tv � tm (equazione del tempo medio) oppure = ETv = tm � tv (equazione del tempo vero);
ε = obliquit� (angolare) dell�eclittica;
z = distanza zenitale. E� l�inverso dell�altezza; perci� vale z = 90� � h;
Pmb = pressione atmosferica in millibars;
PmmHg = pressione atmosferica in millimetri di mercurio. Le relazioni che legano tra loro queste due ultime grandezze sono le seguenti = Pmb = PmmHg 3/4; PmmHg = Pmb 4/3;
UTC = tempo universale civile di Greenwich
2.1) Metodo Nautico
Questo metodo � particolarmente adatto ad essere usato con calcolatrici o addirittura con tavole dei logaritmi. La risoluzione formula per formula consente un immediato controllo dei possibili errori di calcolo. Se usato con le formule di trasformazione geodetica o nautica di ho in hv la precisione dei suoi risultati � paragonabile a quella del Metodo JD. Il suo limite consiste nel fatto che richiede l�uso delle Effemeridi Nautiche dell�anno in corso da cui trarre i dati d�input Tv, Iv, ν, δ, pp di δ. Il suo uso � descritto in dettaglio in Codeb� 1997b ed in Codeb� e Frosini 2014, pp. 152-170.
a) calcolo dell�angolo orario locale del Sole o tv
tm � fuso orario locale E, o tm + fuso orario locale W = Tm
Tm h: =�������� Tv�� di hh����������� +
Im mm e ss = Iv�� di mm e ss�� +
�ν:������������ = �pp���������������������� =
����������������������������
��������������������� TV�� di hh, mm, ss
Tv�� di hh, mm, ss� �+
������� + λ� E; � λ� W��� =
�������������������-
tv��
b) calcolo della declinazione del Sole
� di hh������������������������������������� +
Im dei mm inferiori �d�� = pp������ =
����������������������������-
�di hh, mm inferiori
�di hh�������������������������������������� +
Im dei mm superiori �d� = pp������ =
����������������������������
� di hh, mm superiori
� di hh, mm, ss = interpolazione tra �di hh mm inferiori e �di hh mm superiori
c) calcolo dell�altezza geometrica del Sole
sen h�� = sen δ�� � sen φ� + cos δ��� cos
φ� � cos tv�
d) calcolo dell�azimut del Sole (contato da Nord)
cos A�� = (sen δ�� � sen φ� sen h��) / (cos
φ� cos h��)
se tv > 180�, allora A��1 = A��
se tv < 180�, allora A��1 = 360� � A��
e) calcolo dell�allineamento del monumento
Aa� = A��1 � Am�
f) riduzione di ho in hv (formula semplificata)[12]
hv�� e � = ho� � R� �Sd� + (� � cos ho�)
hv●� = ho� � R� + (Π�● � cos ho�)
hv�� = ho� � R�
g) calcolo della declinazione sottesa al momento della misurazione (da Nord)
sen δ� = sen φ� � sen hv� + cos φ� � cos hv� � cos Aa�
2.2) Metodo JD
Questo metodo pu� essere utilizzato solo come programma, poich� la complessit� delle formule che lo compongono provocano facilmente errori non subito riconoscibili se risolte una per una. L�eventuale errore pu� quindi essere riconosciuto solo a calcolo completato[13]. La sua precisione � mediamente superiore a quella del Metodo Nautico se questo � utilizzato con la formula semplificata di trasformazione di ho in hv. Il suo pregio consiste nel fatto che non richiede l�uso di Effemeridi di alcun tipo. Il suo uso � descritto in dettaglio in Codeb� 2010, pp. 36-50.
a) calcolo della data giuliana
JDE = INT [365,25 � (AAAA + 4716)] + INT [30,6001 � (MM + 1)] + DD,dddd[i] + {2 - INT (AAAA � 100) + INT [(AAAA � 100) � 4]} - 1524,5
oppure:
JDE = INT [365,25 � (AAAA + 4716)] + INT
[30,6001 � (MM + 1)] + DD,dddd - 1524,5
oppure:
INT [365,25 � (AAAA - 1 + 4716)] + INT
[30,6001 � (MM + 12 + 1)] + DD,dddd + {2 - INT [(AAAA
- 1) � 100] + INT {[(AAAA - 1) � 100] � 4}} - 1524,5
oppure:
JDE = INT [365,25 � (AAAA - 1 + 4716)] +
INT [30,6001 � (MM + 12 + 1)] + DD,dddd - 1524,5
b) calcolo dei parametri del Sole[14]
T = (JDE - 2451545,0) � 36525
Lm8� = 280,46646� + 36000,76983� � (T) + 0,0003032� � (T)�
M8� = 357,52911� + 35999,05029� � (T) - 0,0001537� � (T)�
C8� = [1,914602� - 0,004817� � (T) - 0,000014� � (T)�] � sen M� + [0,019993� - 0,000101� � (T)] � sen (2 � M8�) + 0,000289� � sen (3 � M8�)
Lv8� = Lm8 + C
La8� = Lv � 0,00569� -
0,00478� � sen (125,04� - 1934,136� � T)
ε�[15] = 23�26'21,448" - 0�00'4680,93"
� (T � 100) � 0�00'01,55" � (T � 100)� + 0�00'1999,25" � (T � 100)� �
0�00'51,38" � (T � 100)4 � 0�00'249,67" � (T � 100)5
� 0�00'39,05" � (T � 100)6 + 0�00'07,12" � (T � 100)7
+ 0�00'27,87" � (T � 100)8 + 0�00'05,79" � (T � 100)9
+ 0�00'02,45" � (T � 100)10
δ8� = arcsen (sen ε� � sen La�)
Ec = 0,016708634 - 0,000042037 � (T) -
0,0000001267 � (T)�
ETm hms =
{[tan (ε � 2)]� � sen (2 � Lm�) - 2 � Ec � sen M� + (4 � Ec) � [tan (ε� � 2)]� � sen
M� � cos (2 � Lm�) - (1 � 2) � [tan (ε� � 2)]�4
� sen (4 � Lm�) - (5 � 4) � (Ec)�
� sen (2 � M�)} � 180� � 3,14159265359 � 15
H8� = [(UTC � 12h00m00s) � 15] - (�λ�) + (ET
hms � 15)[ii]
h8� = arcsen (sen φ� � sen δ8� + cos φ� � cos δ8� � cos H8�)
c) calcolo degli azimut
A8�1 = arcos [(sen δ8� - sen φ� � sen h8�) � (cos φ� � cos h8�)]
A8� = A8�1 se H8� > 180�
A8� = 360� � A8�1 se H8� < 180�
Aa� = A8� + (� Am�)
d) trasformazione dell�altezza osservata in altezza vera
(formula semplificata)
Hv� = ho� � R� �Sd� + (Π�8 o � cos ho�)
Hv�● = ho� � R� + (Π�● � cos ho�)
hv�0 = ho�� R�
per i pianeti:
(formula nautica)
hv� = ho�� R� + arcsen {sen [Π�● � Π�● � (1 � 298,257) � (sen φ�)�] � cos (ho� � R�)
oppure:
(formula geodetica)
hv� = ho�� R� + arcsen {[0,9983271 + 0,0016764 � cos (2 � φ�) - 0,0000035 � cos (4 � φ�)]} � sen Π�● � cos (ho� � R�)}
e,
nel caso di declinazioni compatibili con il Sole o con
formula nautica:
hv� = ho� � R� � Sd�8 o � � [1 + sen (ho� � R�) � sen Π�8 o ] + [Π�8 o � Π�8 o � (1 � 298,257) � (sen φ�)�] � cos (ho� � R�)
oppure (formula geodetica):
hv� = ho� � R� � Sd�8 o � [1 + sen (ho� � R�) � sen Π�8 o ] + arcsen {[0,9983271 + 0,0016764 � cos (2 � φ�) � 0,0000035 � cos (4 � φ�)] � sen Π�8 o � cos (ho� � R�)}
e) calcolo della declinazione sottesa
δa� = arcsen (sen φ� � sen hv� + cos φ� � cos hv� � cos Aa�)
3) I software di calcolo del Metodo Nautico e Metodo JD (Agostino Frosini)
Questi programmi risolvono le formule sopra descritte da Mario Codeb� per entrambi i sistemi "Metodo Nautico" e "Metodo JD". Essi sono pubblicati e disponibili gratuitamente sul sito www.archaeoastronomy.it. Gli elaborati sono pagine web dinamiche scritte in linguaggio Javascript perch� compatibile con tutti i browser web dei computer e degli smart-phone di ultima generazione (e non solo) che supportino questo tipo di linguaggio informatico.
La pagina web contiene alcuni campi bianchi destinati all'immissione dei dati e alcuni campi grigi per la visualizzazione dei risultati. Nel sottotitolo � presente un link che rimanda ad una pagina web che descrive tutti gli algoritmi utilizzati all'interno del sistema.
Prima di inserire i valori nei
campi, almeno per le prime volte, � utile cliccare sui pulsanti "?",
che fanno aprire un piccolo messaggio con la descrizione dei valori da inserire
nel sistema. E' importante, per il buon funzionamento dei programmi, inserire
solo numeri positivi; per i dati negativi sono stati programmati dei pulsanti
appositi che cambiano il segno. I dati decimali vanno inseriti con il punto e
non con la virgola, pena la non corretta interpretazione delle variabili e
conseguente errore nel risultato.
La prima parte �Inserimento dati� (fig. 1), presenta due schermate. La prima, di facile intuizione, prevede l'inserimento dei dati relativi ai tempi di osservazione, posizione geografica, misure strumentali di azimut ed altezza. La seconda schermata prevede l�inserimento dei dati reperibili dalle Effemeridi Nautiche dell' IIM dell'anno durante il quale � stata fatta la misurazione [16]. In questa seconda schermata � altamente consigliato utilizzare i pulsanti "?" che descrivono al meglio quali sono e dove si trovano sulle Effemeridi i valori da inserire[17]. In buona sostanza si troveranno i valori necessari al calcolo nautico del Tempo vero Tv e della declinazione del Sole. A questo proposito � doverosa una precisazione: i valori trovati, per esperienze e valutazioni personali, non hanno la pretesa di essere molto precisi perch� forniti con l'approssimazione tipica dei calcoli di astronomia nautica per ottenere la posizione di una nave in mare aperto, nei quali non si ritiene necessaria una soluzione esatta al 100%.
La terza parte (fig. 2, met� superiore) � seconda nel "Metodo JD" � � comune ad entrambi i sistemi: qui si dovr� decidere (cliccando sui pallini di spunta) quali formule, per convertire l'altezza misurata in altezza vera, far elaborare al sistema. Di default � stata messa la formula semplificata, ma consigliamo l'utilizzo delle formule geodetica o nautica, sicuramente pi� precise bench� pi� complesse. Per quanto concerne la quota media in metri da inserire nel relativo campo � doveroso fare una precisazione importante: in archeoastronomia si utilizzano di norma strumenti ad orizzonte artificiale, usando i quali il valore da inserire nel programma � pari a zero. Qualora, potendo visualizzare un orizzonte marino o terrestre pianeggiante, si utilizzasse un sestante senza orizzonte artificiale � di uso non comune in archeoastronomia � si dovr� inserire la quota media dell'osservatore, pari all'altezza dell�occhio dell'osservatore rispetto al livello del mare[18]. La rifrazione media da inserire � reperibile dalle Tavole Nautiche dell' IIM alla tavola nr. 22 oppure � possibile calcolarla con le formule di Bennet (Meeus 2005, pp. 106 � 107), per la cui soluzione, oltre che essere stato creato uno specifico un programma scaricabile gratuitamente, sono state inserite, nel software cumulativo �Metodo Nautico e Metodo JD�, due finestre in cui scrivere, rispettivamente, la pressione atmosferica in millibar e la temperatura in gradi Celsius.
La quarta parte (fig. 2, met� inferiore) � terza nel "Metodo JD" � � comune ad entrambi i sistemi. Anche in questo caso si dovr� decidere (cliccando sui pallini di spunta) a quale astro siano state pi� probabilmente allineare le costruzioni indagate[19]. A questo punto il sistema richiede alcuni dati, necessari per correggere le altezze di questi astri in altezze vere che serviranno per il calcolo della declinazione sottesa dall'allineamento.
Le stelle, in quanto puntiformi e molto lontane, non necessitano di alcuna ulteriore correzione. Pianeti, Sole e Luna invece sono tutti e tre affetti, a causa della loro "relativa" vicinanza rispetto all'osservatore sulla Terra, dalla parallasse; gli ultimi due anche da un evidente diametro apparente.
Le parallassi di Sole, Luna e
pianeti sono calcolabili con
Per Sole e Luna si dovranno
inoltre inserire i rispettivi semidiametri per avere le altezze riferite al
loro centro geometrico. Questi valori devono essere �aggiunti� se si considera
il lembo inferiore, �sottratti� se si considera il lembo inferiore. I valori
numerici vanno inseriti senza segno; un apposito pulsante �+/�� li rende
positivi o negativi. Il semidiametro di Sole e Luna � dato nelle pagine
giornaliere delle Effemeridi Nautiche in calce alle rispettive colonne oppure
pu� essere calcolato con
L'inclinazione media dell'orbita lunare sull'eclittica � gi� inserita nel sistema ed � pari a 5�09'00".
La quinta parte (fig. 3) � quarta nel metodo JD � � dedicata alla visualizzazione dei risultati. Una volta inseriti tutti i dati, baster� semplicemente cliccare sul pulsante "Calcola" per ottenere: azimut dell�astro utilizzato al momento della misurazione, azimut dell'allineamento, declinazione sottesa dall'allineamento e suo reciproco, ovvero la declinazione calcolata su un allineamento opposto (180�) a quello misurato[20]. Solo dopo aver premuto il pulsante "Calcola" si potranno utilizzare i pulsanti "Tabella Risultati" e "Lista Risultati", che aprono una pagina web contenente in dettaglio tutti i risultati parziali del calcolo. L�utilit� di queste pagine � la possibilit� di stampa ed il controllo dei risultati parziali. Se invece si volessero eseguire i calcoli autonomamente per verificarne la correttezza � possibile utilizzare il link "Algoritmi Utilizzati" presente in intestazione, controllandone passo passo i risultati.
Un ultima precisazione: nei
risultati i valori compresi tra �9 e 9 sono riportati senza lo �
I programmi sono distribuiti gratuitamente per volont� dell' autore, ma anche per dare la possibilit� al maggior numero possibile di utenti di testarli, di scoprire difetti nascosti, di riportare eventuali casi particolari da correggere per ottenere la massima affidabilit�. A questo scopo non esitino i lettori e gli utenti a segnalare eventuali "bug", limiti, errori di ortografia all'indirizzo ago.pax@libero.it.
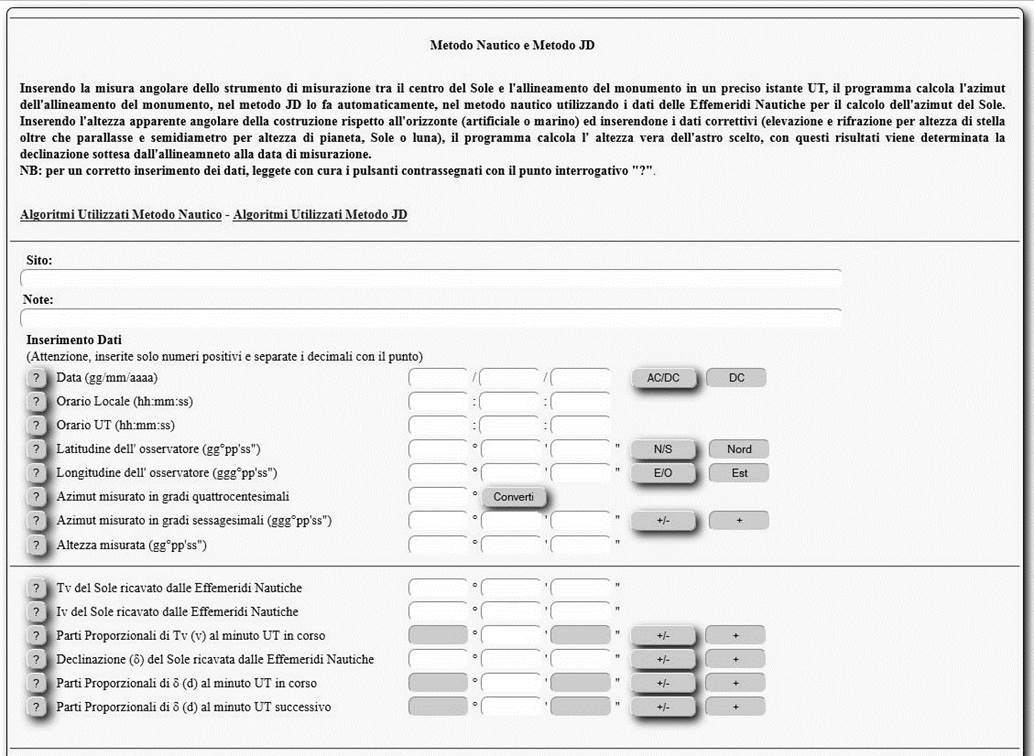
Fig.1
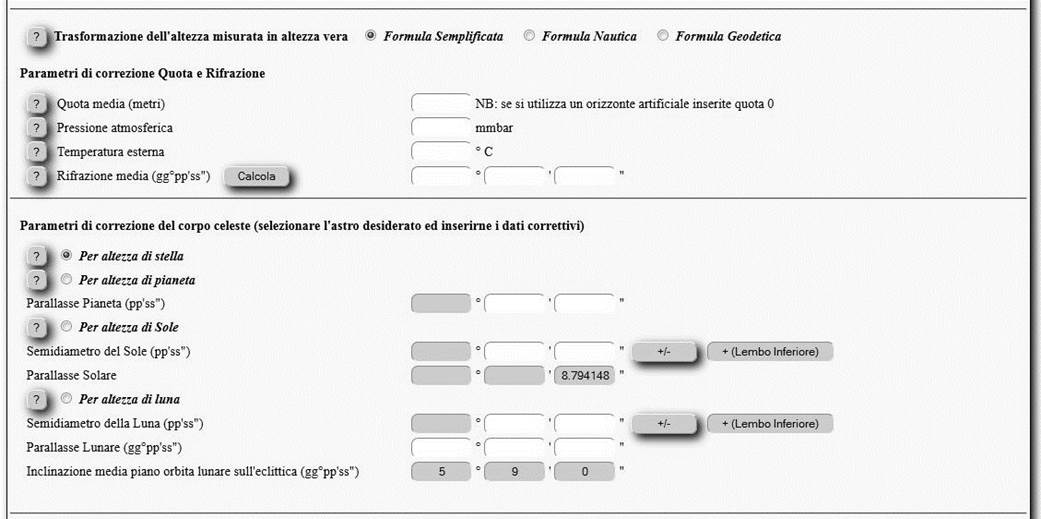
Fig.2
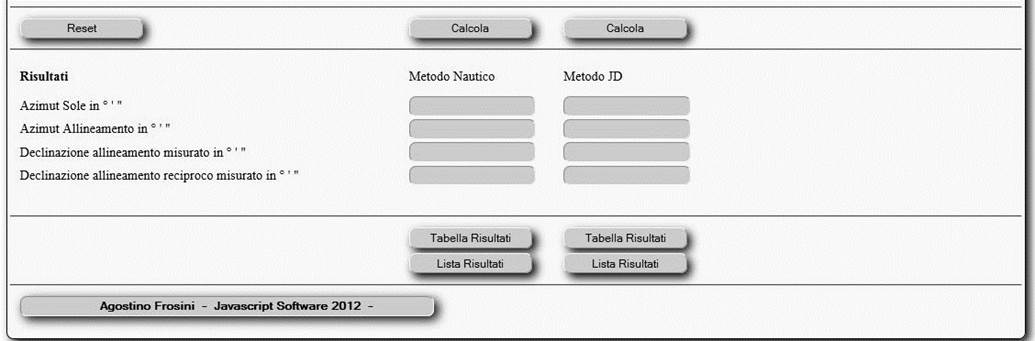
Fig.3
Bibliografia
Codeb� Mario (1997a), Uso della
bussola in archeoastronomia, in: �Atti del XVI Congresso Nazionale di Storia della Fisica e dell'Astronomia�,
a cura di P. Tucci, (Como, 24 � 25 maggio 1996), pp. 323 � 335. http://www.archaeoastronomy.it/uso_bussola_archeoastronomia.htm
Codeb� M. (1997b), Problemi generali del rilevamento archeoastronomico, in: �Atti del I seminario
A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 22 febbraio
http://www.archaeoastronomy.it/corso_elementare_archeoastronomia.htm
Codeb� Mario
(2010). L�algoritmo
Giuliano del Sole, in: �Atti del XII
Seminario A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 17 �
18 aprile 2010).
�http://www.archaeoastronomy.it/algoritmo_sole.htm
Codeb� M. (2011) Il calcolo FK4 B1950.0 della precessione delle stelle, in: �Atti del XIII Seminario
A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 09 � 10 aprile 2011). http://www.archaeoastronomy.it/calcoloFK4.htm
Codeb� M. (2012) Il calcolo FK4 B1900.0 della precessione delle stelle, in: �Atti del XIV Seminario
A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 24 � 25 marzo 2012). http://www.archaeoastronomy.it/CALCOLO_FK4_B1900.htm
Codeb� M. (2014) Dall�altezza misurata all�altezza vera, in: �Atti del XVI Seminario A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 12 � 13 aprile 2014).
http://www.archaeoastronomy.it/altezza_misurata_vera.htm
Codeb� M., De Santis H., Bon�ra V., Marano Bon�ra A. (2004). Gli orientamenti astronomici delle chiese di S. Giulia e S. Margherita di Capo Noli, in: �Rivista Italiana di Archeoastronomia�, II, 2004, Edizioni Quasar, Roma, pp. 87-94.
http://www.archaeoastronomy.it/s_giulia_s_margherita.htm
Codeb�
M., Frosini A. (2013). Il metodo
nautico (per il
calcolo dell�azimut di un allineamento e della declinazione da esso sottesa), in: �Atti del XV Seminario
A.L.S.S.A. di Archeoastronomia�, a cura di G. Veneziano (Genova 13 � 14 aprile
2013). http://www.archaeoastronomy.it/Metodo_nautico.htm
Flora F. (1987) Astronomia Nautica, Hoepli, Milano.
Meeus J.
(1988) Astronomical formulae for
calculators, Willmann � Bell Inc., Richmond,
Virginia, U.S.A.
Meeus J. (1990) Astronomia con il computer, Hoepli, Milano.
Meeus J.
(2005) Astronomical Algorithms, Willmann � Bell Inc.,
Romano G. (1991) Orientamenti magnetici ed astronomici nelle mappe archeologiche, in �Rivista di Archeologia�, Supplemento n. 9, Venezia, pp. 23 � 29.